I am getting ready to order parts and build the tuner. To prepare for it, I have updated the blog in the middle of building the new EME 5m dish project at the DVRA shack.
I use KiCad 6.0 circuit CAD tools. It has multi page schematic capture capability of sorts. The tuner schematic is a total of 3 pages. They are the RF path, the directional coupler and the main page which is mostly the microprocessor circuit and the display interface. I will start with the RF path page.
The inductor and capacitor networks, from the previous discussions, should be obvious. K1 and K19 control the bypass or through the LC network path. K2 and K20 put the capacitor network in parallel with the load or with the source depending on the location of the load in region 1 or region 2 of the Smith Chart.
Relay Driver
The relay driver is a Toshiba TBD62783A which is a "source type DMOS transistor array". Normally, one side of the relay coil is connected to the power supply and the other side is grounded using some type of active device. A flyback diode is incorporated to protect the device. This device uses a P-Channel MOSFET to connect one side of the relay to +12 volts while the other side is permanently grounded. It also incorporates the fly back diode inside the device. Its input is compatible with 3 volt logic. As you can see from the schematic, it drastically simplifies the board layout compared to the alternatives.
Relays:
I do not plan to open or close the relays with the power applied. So, the two parameters that matter for my design are the open contact breakdown voltage and close contact current carrying capacity.
First, I will review some items about how the LC network:
- The inductors and inductor relays form a series circuit. The "inductor current" is either carried by the inductor when the relay is open or by the relay when the relay is closed.
- If the inductor relay is closed, the voltage across it is zero and if it is open the voltage across it will be the same as inductor voltage
- The capacitors and capacitor relays form a parallel circuit. The "capacitor voltage" is either the voltage across the capacitor when the relay is closed or across the relay when the relay is open.
- If the capacitor relay is closed, the current through it is the capacitor current and if the relay is open, it is zero.
There are two factors that go into the selection of relays:
- When the relay is open, the dielectric strength between the contacts (1 Form A and 1 Form C) should be good enough not to break down at voice peaks at 800 watts peak power.
- When the relay is closed, the rated carry current should be sufficient to support the current at 200 watts average power.
The Omron G2RL dielectric strength specification is 1,000 VAC (I assume RMS) at 50/60 Hz. K6JCA quotes a reference in his blog recommending a safety factor of 0.8 for RF applications. This sets the limit at 800 volts. From the Maximum Voltage and Currents table in section 4, we see this requirement is met at 800 watts of short duration peak output (voice peaks in side band transmission).
These relays also have a carry current specification of 12 Amps for single pole standard type relays. Again, from the aforementioned table, this requirement is also met at 200 watts of average power.

Next, I will review the directional coupler page. From the directional coupler discussion page, the circuits on this page should be quite familiar to the reader. The only additional comments that I make are that during testing, I found that R24 and R27 are redundant. That is not how I read the AD8302 data sheet. I will have to further investigate this and add it to the blog. Also during the prototype testing, I ended up adding a 15 tap FIR low pass digital filter when reading the magnitude and phase voltages from the AD8302. I will have to look further into this.
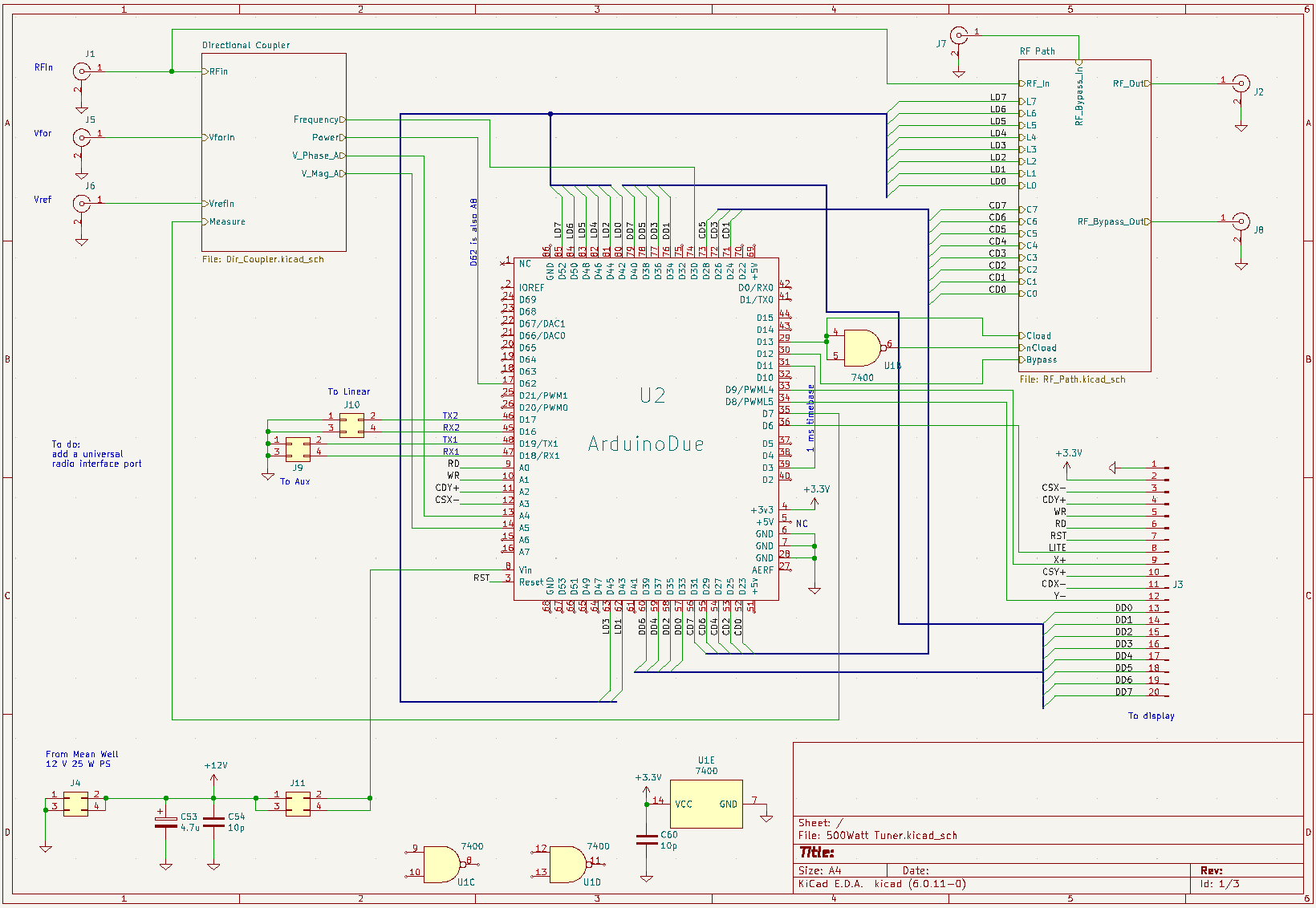
Finally, below is main page. The function of J11 is to disconnect 12 volts from the Arduino during programming with the lap top.
The two blocks in the upper left and right are the abstraction of the two pages that I have already discussed. The connector in the lower right is the touch screen display connector (read the Arduino documentation carefully, this interface is a bit tricky). I also found that when I set the Arduino to read analog inputs using 12 bit A/D, it interferes with the display operation. So, as soon as the analog input is read, the A/D must be put back into 10 bit mode. The block in the middle is the Arduino Due.
If you note, there is a funny arrangement for the bypass connectors. The reason is that I do not plan to route the bypass RF signal on the PWB (routing got too complicated). I will have an SMA cable running from one side of the PWB to the other side. A much simpler solution. So, J7 and J8 are connected to each other with the SMA jumper.
The two connectors J5 and J6 connect to the directional coupler as you can see in the prototype picture below. The two inductors on the right are the voltage (white) and current (blue) sense transformers. The two cables on the right (the blue side of the directional coupler) are the main RF signals. The tow SMA cables on the left (white) side are the forward and the reflected signal cables. This is a prototype of magnitude and phase sensor.
As of now, I have decided not to incorporate a power supply into the package and power the tuner of the Power Pole distribution. I am feeding the Power Pole with a 20 Amp Astron linear supply that I have owned since the early 90s. Worst case, I will upgrade the power supply. The Power Pole can handle up to 40 amps.
And here is the board layout as it stands now:




No comments:
Post a Comment